 工业机器人结构设计ppt课件.ppt
工业机器人结构设计ppt课件.ppt
《工业机器人结构设计ppt课件.ppt》由会员分享,可在线阅读,更多相关《工业机器人结构设计ppt课件.ppt(172页珍藏版)》请在三一办公上搜索。
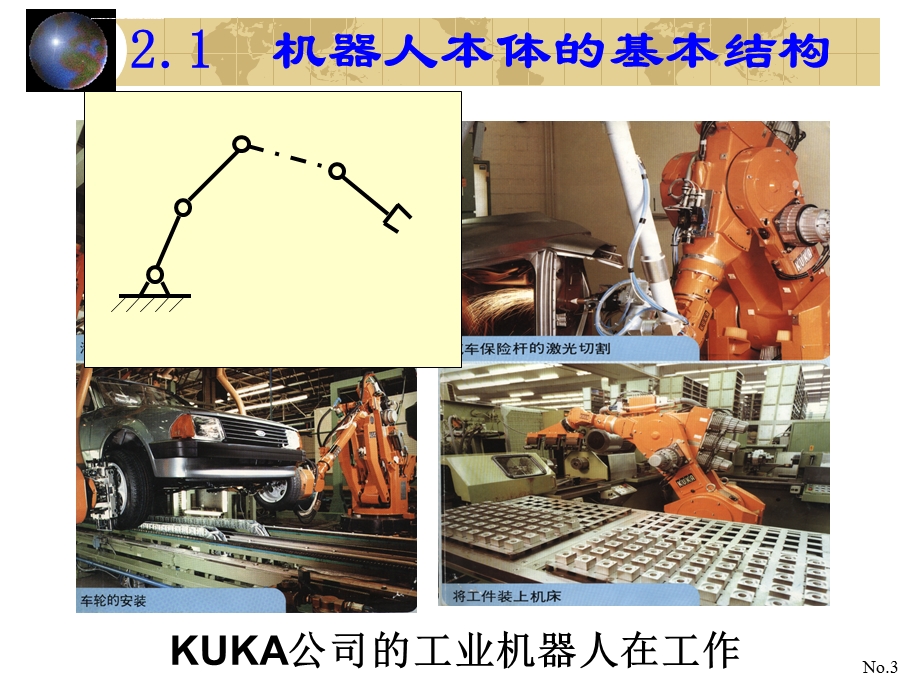
1、第2章 机器人结构设计基础,2.1 本体基本结构2.2 手部设计2.3 腕部设计2.4 臂部设计2.5 缓冲与定位2.6 行走机构,一、机器人本体基本结构组成:,1、传动部件2、机身及行走机构3、臂部4、腕部5、手部,2.1 机器人本体的基本结构,KUKA公司的工业机器人在工作,2.1 机器人本体的基本结构,二、机器人本体基本结构特点:,1、可以简化成各连杆首尾相接、末端无约束的开式连杆系,连杆系末端自由且无支承,这决定了机器人的结构刚度不高,并随连杆系在空间位姿的变化而变化。,2.1 机器人本体的基本结构,二、机器人本体基本结构特点:,2、开式连杆系中的每根连杆都具有独立的驱动器,属于主动连
2、杆系,连杆的运动各自独立,不同连杆的运动之间没有依从关系,运动灵活。,2.1 机器人本体的基本结构,二、机器人本体基本结构特点:,3、连杆驱动扭矩的顺态过程在时域中的变化非常复杂,且和执行器反馈信号有关。连杆的驱动属于伺服控制型,因而对机械传动系统的刚度、间隙和运动精度都有较高的要求。,2.1 机器人本体的基本结构,二、机器人本体基本结构特点:,4、连杆系的受力状态、刚度条件和动态性能都是随位姿的变化而变化的,因此,极容易发生振动或出现其他不稳定现象。,2.1 机器人本体的基本结构,二、机器人本体基本结构特点:,工作负载与自重的比值静、动态刚度 定位精度、跟踪精度 控制系统的要求、造价 机械系
3、统设计的灵活性固有频率 避开工作频率 系统的稳定性,2.1 机器人本体的基本结构,2.1 机器人本体的基本结构,1、材料选择的基本要求:强度高弹性模量大重量轻阻尼大材料经济性,三、机器人本体材料的选择:,三、机器人本体材料的选择:,1、机器人常用材料:碳素结构钢和合金结构钢(广泛采用)铝、铝合金及其他轻合金材料(重量轻)纤维增强合金(较高的 E/比)陶瓷纤维增强复合材料(高阻尼)粘弹性大阻尼材料,2.1 机器人本体的基本结构,SIWR-型和型水下作业机械手模拟试验装置,2.2 手部设计,2.2 手部设计,新松的装配机器人,2.2 手部设计,2.2.1 钳爪式手部的设计2.2.2 吸盘式手部的设
4、计2.2.3 类人机器人的手部 关节式手指,2.2 手部设计,习题:设计一手部结构,用来抓取盘中的苹果。要求:画出结构,并给出关键尺寸。说明其驱动方式及计算增力比N/P。,机器人的手部是重要的执行机构。从其功能和形态上看,它可分为工业机器人的手部和类人机器人的手部。前者应用较多,也比较成熟,后者正处于深入研究阶段。 工业机器人的手部是用来抓取工件或工具的部件。由于被抓取的工件的形状、尺寸、重量、材质等的不同,手部的结构也是多种多样的,大部分的手部结构是根据特定的工件要求而专门设计的。各种手部的工作原理不同,结构型式各异。常用的手部按其握持原理的不同可分为两类,即钳爪式和吸附式。,2.2.1 钳
5、爪式手部的设计,2.2 手部设计,2.2.1 钳爪式手部的设计,钳爪式手部的组成 一般的钳爪式手部由以下三部分组成:手指:传动机构:驱动装置: 此外,还有连接和支撑元件,将上述各部分连接成一个整体,以及实现手部与机器人的腕部的连接。,2.2.1 钳爪式手部的设计,一、手指,2.2.1 钳爪式手部的设计,二、传动机构回转型传动机构,2.2.1 钳爪式手部的设计,斜楔杠杆式手部,二、传动机构回转型传动机构,2.2.1 钳爪式手部的设计,滑槽杠杆式手部,二、传动机构回转型传动机构,2.2.1 钳爪式手部的设计,双支点连杆杠杆式手部,二、传动机构回转型传动机构,2.2.1 钳爪式手部的设计,齿条齿轮杠
6、杆式手部,二、传动机构平移型传动机构,2.2.1 钳爪式手部的设计,直线平移型手部,二、传动机构平移型传动机构,2.2.1 钳爪式手部的设计,四连杆机构平移型手部,1-齿条 2-齿轮 3-工件齿轮齿条移动式手爪,1,3,2,2.2.1 钳爪式手部的设计,二、传动机构其它结构型式,重力式手爪,二、传动机构其它结构型式,拨杆杠杆式钳爪,二、传动机构其它结构型式,内撑式三指钳爪,二、传动机构其它结构型式,三、钳爪式手部的设计要点,2.2.1 钳爪式手部的设计,应具有足够的夹紧力应具有足够的张开角应能保证工件的可靠定位应具有足够的强度和刚度应适应被抓取对象的要求应尽量做到结构紧凑、重量轻、效率高应具有
7、一定的通用性和可互换性,四、钳爪式手部结构举例以及夹紧力的分析计算,2.2.1 钳爪式手部的设计,手部机构的结构型式不同,其特点也各不相同,下面仅举几个结构实例及其夹紧力的计算公式供设计时参考。钳爪式手部机构夹持工件的夹紧力是通过驱动装置(液压、气动或电动)所产生的驱动力经过手部机构的传递而产生的。,四、钳爪式手部结构及其夹紧力的计算公式举例,齿轮齿条式手部结构,注:两手指平移 增力比(N/P)小,N=P/2,N,N,P,2.2.1 钳爪式手部的设计,四、钳爪式手部结构及其夹紧力的计算公式举例,平行连杆杠杆式手部结构,N=PLcos(+)/(2lsincos),注:ABDE,DBAE,LBC杆
8、长,lAB杆长;两手指保持平行;当角较小时,可获得较大的力比。,N,N,P,A,B,C,E,2.2.1 钳爪式手部的设计,四、钳爪式手部结构及其夹紧力的计算公式举例,连杆杠杆式手部结构,P,N,N,c,b,N=Pcsin(+)/2bsinsin,注:手指开闭角较小;当取较小的时,可获得较大的增力比(即NP),2.2.1 钳爪式手部的设计,四、钳爪式手部结构及其夹紧力的计算公式举例,斜楔杠杆式手部结构,P,c,b,P,N,N=Pcctg/2,N,2.2.1 钳爪式手部的设计,四、钳爪式手部结构及其夹紧力的计算公式举例,滑槽杠杆式手部结构,P,N,N,b,NPc/2b,2.2.1 钳爪式手部的设计
9、,吸附类手部也主要分为两种,即气吸式和磁吸式两种。 气吸式是指用负压吸盘吸附工件,按负压产生的方式不同,可分为挤压式和真空式两种。 磁吸式手部是在手腕部装上电磁铁,通过电磁吸力把工件吸住。,2.2.2 吸附式手部的设计,一、气吸式手部的种类,真空吸盘系统,2.2.2 吸附式手部的设计,一、气吸式手部的种类,1,2,3,4,5,4,2.2.2 吸附式手部的设计,一、气吸式手部的种类,气流负压喷嘴吸盘结构原理图 挤压负压式吸盘,2.2.2 吸附式手部的设计,吸力大小与吸盘的直径大小,吸盘内的真空度(或负压大小)以及吸盘的吸附面积的大小有关。工件被吸附表面的形状和表面不平度也对其有一定的影响,设计时
10、要充分考虑上述各种因素,以保证有足够的吸附力。应根据被抓取工件的要求确定吸盘的形状。由于气吸式手部多吸附薄片状的工件,故可用耐油橡胶压制不同尺寸的盘状吸头。,二、气吸式手部的设计要素,2.2.2 吸附式手部的设计,三、气吸式手部的吸力计算,2.2.2 吸附式手部的设计,吸盘吸力的大小主要取决于真空度(或负压的大小)与吸附面积的大小。 真空吸盘吸力F计算公式:,磁吸式手部是利用永久磁铁或电磁铁通电后产生磁力来吸取工件。 磁吸式手部只能对铁磁物体起作用;另外,对某些不允许有剩磁的零件要禁止使用。所以,磁吸式手部的使用有一定的局限性。,2.2.2 吸附式手部的设计,四、磁吸式手部的原理与应用,五、磁
11、吸式手部,2.2.2 吸附式手部的设计,电磁铁工作原理,五、磁吸式手部,2.2.2 吸附式手部的设计,盘状磁吸附手部结构,五、磁吸式手部,2.2.2 吸附式手部的设计,几种电磁式吸盘工作示意图,应具有足够的电磁吸引力。应根据被吸附工件的形状、大小来确定电磁吸盘的形状、大小,吸盘的吸附面应与工件的被吸附表面形状一致。电磁吸力的计算a.直流电磁铁的吸力计算:b.交流电磁铁的吸力计算:,2.2.2 吸附式手部的设计,六、磁吸式手部的设计要点及计算,磁盘;2防尘盖;3线圈;4外壳体;5螺母;6防尘螺母;7,9垫圈;8螺母;10轴承;11出导线孔,2.2.1 钳爪式手部的设计,带“眼睛”(机器视觉系统)
12、的件箱拆垛手爪;工料定位精度mm,负载能力100kg;物料最大尺寸:1000mm600mm,可2件或3件一起抓取。,带“眼睛”(机器视觉系统)的辅料堆垛手爪;工料识别准确率:100%,工料定位精度1mm,负载能力125kg;物料最大尺寸:600mm500mm,件箱堆垛手爪:负载能力100kg,物料最大尺寸:1000mm600mm,带传感器识别、抓取薄膜的拆包手爪:识别定位精度0.5mm,带抓取、剪断钢质捆扎带机构。,烟包搬运机械手:搬运负载能力300kg,带取夹板辅助功能。,大部分的工业机器人的手部只有两个手指,而且手指上一般没有关节。为了使机器人的手臂能完成各种不同的工作,有更大的适应性和通
13、用性,除了要使臂部具有更大的空间活动范围外,还要在其上安装一个更灵巧的手,即类人手。这种手是由若干带有关节的手指构成。,2.2.3 类人机器人的手部关节式手指,类人机器人的手部,具有多关节的三指手,类人机器人的手部,1,9-适应弹簧 2,3,8-连杆 4食指 5中指6无名指 7小指 10蜗轮 11驱动杆贝尔格莱德手,1,2,3,4,5,6,7,8,9,10,11,在张启先院士的主持下,北京航空航天大学机器人研究所于80年代末开始灵巧手的研究与开发。 灵巧手有三个手指,每个手指有3个关节,3个手指共9个自由度,微电机放在灵巧手的内部,各关节装有关节角度传感器,指端配有三维力传感器,采用两级分布式
14、计算机实时控制系统。,北航研制的BH-3灵巧手,北航研制的BH-4灵巧手,BH-4型灵巧手有四个手指,每个手指有4个关节,4个手指共16个自由度,其关节由齿轮传动,包括直流伺服电机、行星减速器和光码盘在内的电机单元驱动。光码盘用于测量电机轴相对转角,关节轴绝对转角由电位计测量。,四指每个手指三个自由 度,末端两关节耦合 腱和滑轮传动直线电机驱动指端力/力矩传感器位置传感器关节力矩传感器,哈尔滨工业大学研制的HIT-1手,哈尔滨工业大学研制的HIT/DLR手,四指每个手指三个自由 度,基关节两个,上面两个关节通过连杆耦合齿轮系、谐波齿轮 传动无刷直流电机驱动指端力/力矩传感器位置传感器关节力矩传
15、感器传感器处理电路,电机驱动电路实现手指集成化,我校研制的三指灵巧手,三指手指三自由度斜齿轮传动直流电机驱动位置传感器指端三维力传感器,美国麻省理工学院Utah/MIT灵巧手,Utah/MIT型灵巧手外形与人手更接近。该手包括3个具有4自由度的手指和一个拇指,其几何尺寸和人手接近。 该手由4个具有4自由度的手指模块组成,每个模块由腱、滑轮传动系统驱动。,Stanford/JPL灵巧手,Stanford/JPL型灵巧手有三个手指,每个手指有3个自由度和4根控制线,整个手由12个直流伺服电机组成的驱动块驱动。该手的控制实验主要集中在手指尖的抓取。,德国宇航中心研制的DLR手,DLR-II手,DLR
16、-I手,DLR-II手的精确操作,DLR-II手的强力抓取,“海沟号”无人潜水器 “海沟号”无人潜水器在大海中,摘西红柿机器人,2.3 腕部设计,2.3.1 概述 2.3.2 腕部的设计要点 2.3.3 典型的腕部结构,2.3.1 概述,机器人操作臂将末端工具置于其工作的三维空间内的任意点需要三个自由度。为了进行实际操作,它还应该能够将工具置于任意的方位,这还需要一个腕部,它一般还需要有三个自由度,即回转、俯仰和摆动三个自由度。,2.3.1 概述,具有回转、俯仰和摆动三个自由度的手腕,回转,摆动,手腕,俯仰,2.3.1 概述,(a)是一种翻转(Roll)关节,它把手臂纵轴线和手腕关节轴线构成共
17、轴线形式,这种R关节旋转角度大,可达到360以上。 (b)(c)是一种折曲(Bend)关节,关节轴线与前后两个连接件的轴线相垂直。这种B关节因为受到结构上的干涉,转角度小,大大限制了方向角。这和人的手腕差不多. (d)所示为移动关节,也叫T关节,2.3.1 概述,二自由度手腕可以由一个R关节和一个B关节组成BR手腕(a),也可以由两个B关节组成BB手腕(b)。但是,不能由两个R关节组成RR手腕,因为两个R关节共轴线,所以退化了一个自由度,实际只构成了单自由度手腕(c).,2.3.1 概述,三自由度手腕可以由B关节和R关节组成许多种形式。此外,B关节和R关节排列的次序不同,也会产生不同的效果,也
18、产生了其它形式的三自由度手腕。为了使手腕结构紧凑,通常把两个B关节安装在一个十字接头上,这对于BBR手腕来说大大减小了手腕纵向尺寸。,2.3.1 概述,2.3.1 概述,2.3.1 概述,2.3.2 腕部的设计要点,结构应尽量紧凑、重量轻 要适应工作环境的要求 要综合考虑各方面要求,合理布局,2.3.3 典型的腕部结构,一、直接驱动的腕部结构 A.具有回转运动的腕部结构,A.具有回转运动的腕部结构,具有回转缸的腕部结构,2.3.3 典型的腕部结构,一、直接驱动的腕部结构 A.具有回转运动的腕部结构 B.具有回转和摆动运动的腕部结构,B.具有回转和摆动运动的腕部结构,具有回转与摆动的腕部结构,2
19、.3.3 典型的腕部结构,一、直接驱动的腕部结构 A.具有回转运动的腕部结构 B.具有回转和摆动运动的腕部结构二、具有机械传动的腕部结构 A.具有两个自由度机械传动的腕部结构 a.腕部的俯仰运动;b.手部的回转运动; c.腕部的俯仰运动引起的诱起运动,A.具有两个自由度机械传动的腕部结构,具有两个自由度机械传动的腕部结构原理,2.3.3 典型的腕部结构,一、直接驱动的腕部结构 A.具有回转运动的腕部结构 B.具有回转和摆动运动的腕部结构二、具有机械传动的腕部结构 A.具有两个自由度机械传动的腕部结构 a.腕部的俯仰运动;b.手部的回转运动; c.腕部的俯仰运动引起的诱起运动 B.具有三个自由度
20、机械传动的腕部结构 a.腕部俯仰运动及其诱起运动;b.腕部回转运动 及其诱起运动;c.手部回转运动,B.具有三个自由度机械传动的腕部结构,具有三个自由度机械传动的腕部机构原理图,1,2,3,B2,T,S,4,5,6,7,8,9,10,11,12,13,14,15,16,17,19,18,B1,B,2.3.3 典型的腕部结构,一、直接驱动的腕部结构二、具有机械传动的腕部结构三、柔顺手腕结构,2.3.3 典型的腕部结构,2.3.3 典型的腕部结构,2.3.3 典型的腕部结构,柔顺手腕结构,2.3 臂部设计,2.3.1 概述2.3.2 臂部设计要点 2.3.3 臂部的结构形式,2.3.1 概述,臂部




- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 工业 机器人 结构设计 ppt 课件
 三一办公所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三一办公所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《焊接结构设计 》PPT课件.ppt《焊接结构设计 》PPT课件.ppt
第8章钢与混凝土组合结构设计ppt课件.ppt第8章钢与混凝土组合结构设计ppt课件.ppt
飞机结构设计课件.ppt飞机结构设计课件.ppt
混凝土结构设计原理PPT课件第2章结构按极限状态法设计原则.ppt混凝土结构设计原理PPT课件第2章结构按极限状态法设计原则.ppt
《机器人结构设计》PPT课件.ppt《机器人结构设计》PPT课件.ppt
第七章 组织结构设计ppt课件.ppt第七章 组织结构设计ppt课件.ppt
第九章复合材料的结构设计ppt课件.ppt第九章复合材料的结构设计ppt课件.ppt
修改第6讲 内支撑结构设计ppt课件.ppt修改第6讲 内支撑结构设计ppt课件.ppt
第七章 组织结构设计ppt课件.ppt第七章 组织结构设计ppt课件.ppt
第5章 软件体系结构设计ppt课件.ppt第5章 软件体系结构设计ppt课件.ppt
《焊接结构设计 》PPT课件.ppt《焊接结构设计 》PPT课件.ppt
第8章钢与混凝土组合结构设计ppt课件.ppt第8章钢与混凝土组合结构设计ppt课件.ppt
飞机结构设计课件.ppt飞机结构设计课件.ppt
混凝土结构设计原理PPT课件第2章结构按极限状态法设计原则.ppt混凝土结构设计原理PPT课件第2章结构按极限状态法设计原则.ppt
《机器人结构设计》PPT课件.ppt《机器人结构设计》PPT课件.ppt
第七章 组织结构设计ppt课件.ppt第七章 组织结构设计ppt课件.ppt
第九章复合材料的结构设计ppt课件.ppt第九章复合材料的结构设计ppt课件.ppt
修改第6讲 内支撑结构设计ppt课件.ppt修改第6讲 内支撑结构设计ppt课件.ppt
第七章 组织结构设计ppt课件.ppt第七章 组织结构设计ppt课件.ppt
第5章 软件体系结构设计ppt课件.ppt第5章 软件体系结构设计ppt课件.ppt

链接地址:https://www.31ppt.com/p-1935987.html